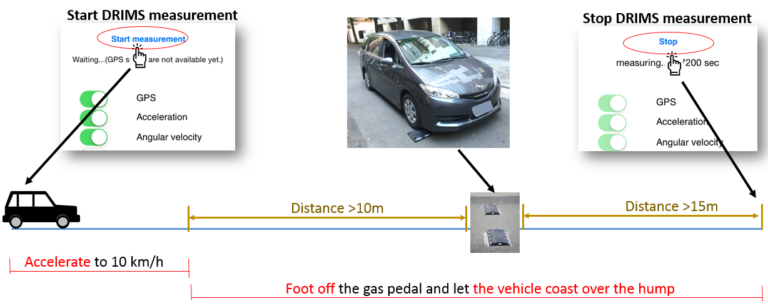
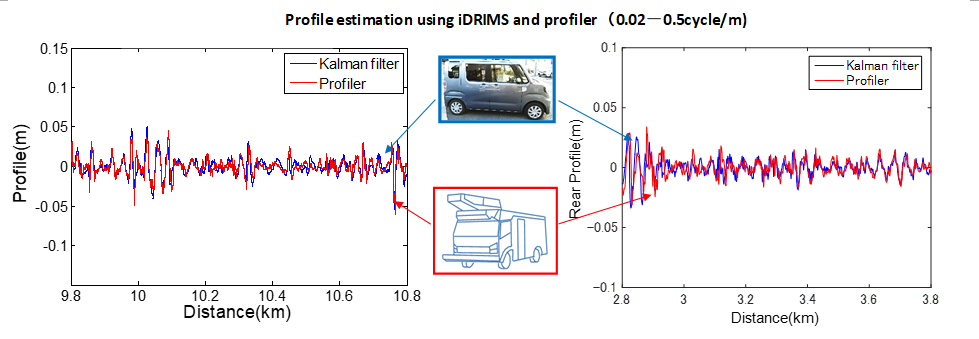
A road profile estimation method using an ordinary-vehicle’s responses measured by only a smartphone has been developed. The algorithm consists of two steps. At first, an ordinary vehicle is modelled as a half car, which can represent both vehicle bouncing and pitching motions, and its parameters are identified by a genetic algorithm using responses of the vehicle passing over a known-size hump (hump calibration). With the estimated vehicle model, an augmented Kalman filter, in which the road profile is included in the state vector, estimates the road profile. The combination of the vehicle parameter estimation and the profile estimation methods accurately estimates road profile with a high accuracy and robustness.