Technology
Why DRIMS
Practical road condition assessment widely used by road owners is roughly categorized into two groups: visual inspection and precise measurement employing laser and other sensors.
Visual inspection is performed during routine patrol drives without using expensive instruments. Potholes, severe cracks, and other road distress are visually observed. Visual inspection provides a simple way of road condition assessment. The quality of evaluation, however, relies on the skill of inspectors. In addition, it is difficult to visually evaluate long wavelength components of road profiles, which significantly influences ride quality.
Profiler vehicles equipped with non-contact laser transducer, camera, accelerometer, GPS or other sensors are used to evaluate road condition in detail. The profiler vehicle is, however, expensive; the sensing instruments and operations are both costly. The profiler vehicles are therefore used only at limited highway and trunk roads. The frequency of the road evaluation is also limited. Other roads are left without objective evaluation. In some developing countries, the use of expensive systems are not practical even at highways.
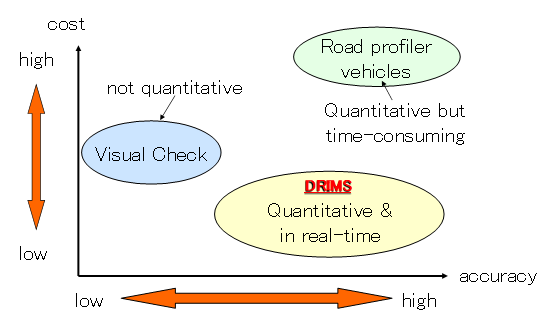
A variety of response-based road evaluation methods have been developed to provide an objective assessment at a low-cost with high efficiency. The accuracy was however not necessarily satisfactory. DRIMS, a response-based evaluation system, addresses the problem by estimating the road profile and International Roughness Index (IRI) accurately.
DRIMS (originally named as Vehicle Intelligent Monitoring System; VIMS) was developed since 2001 with the following concepts: (a) a simple and inexpensive system which can be mounted on an ordinary vehicle without the need of vehicle modification; and (b) a system which utilize dynamic responses of an ordinary vehicle together with the GPS information to estimate pavement condition efficiently over a long distance course. DRIMS can objectively detect damage with a reasonable accuracy. The inspection cost is low because DRIMS uses simple instruments; high frequency inspection is feasible.
The first DRIMS was developed using a MEMS type accelerometer connected to a PC and a simple quarter-car model (PC-based DRIMS). IRI is estimated using a correlation between IRI and acceleration responses after compensating for vehicle type and drive speed differences in the frequency domain. DRIMS was then improved by using a smartphone as the sensor and a Kalman filter analysis on a half-car model (smartphone-based DRIMS). Ten parameters of the half-car model, which can represent vehicle motion more in detail than the quarter car model, are identified through a hump calibration test drive where a vehicle pass over a hump of a known size. Most recent development includes the half-car model identification using only ordinary drive records removing the need for the hump calibration (HC model identification through ordinary drives).